Solar tracker — Система ориентирования на Солнце
Модель системы ориентирования на Солнце.
Во время моих солнечных опытов возник вопрос так называемой системы sun tracking, т.е. системы ориентирования на Солнце. Такие системы используют для автоматической ориентации таких приборов как солнечные тепловые концентраторы, солнечные батареи и т.д. В sun tracking системах используют датчики освещения, с помощью которых определяется наиболее оптимальное положение к солнцу. Вращения системы осуществляет двигатель с редуктором.
Для коррекции положения по одной оси используется два датчика освещения, в данном случае фоторезистора. Они расположены таким образом, чтобы при оптимальной ориентации на Солнце, уровень сигналов датчиков был одинаков. Если ось устройства ориентированы на солнце не точно, соответственно, один из датчиков освещается меньше. А разница между уровнями сигналов датчиков определяет в какую сторону надо вращать систему (двигатель).
![]()
![]()
Для ориентирования по двум осям я пытался использовать три сенсора. Для нормальной работы такой системы приходилось сначала ориентировать систему по одной оси, например в горизонтальной. А после того, как уровень сигналов от двух сенсоров выровняется, корректировать систему по вертикали. Но такой подход оказался хотя и интересным, однако не совсем технически грамотным. На самом деле, цена еще одного сенсора настолько мала, что проще сделать два независимых канала с 4-мя сенсорами. Это ускорит ориентирование по двум осям.
![]()
Сначала я расположил сенсоры таким образом, чтобы они были направлены под углом, как показано на рисунке (а). Идея заключалась в том, что только при оптимальном освещении сигналы с сенсоров будут равными. Такой подход оказался ошибочным. Особой разницы между сигналами двух сенсоров не было. Стабильно система заработала только с использованием перегородки между двумя сенсорами (рисунок б, в). Перегородка затеняет один из сенсоров при неправильном ориентировании, что существенно изменяет разницу между сигналами фоторезисторов. Для увеличения точности ориентирования сенсоры должны быть расположены как можно ближе друг к другу, а перегородка быть как можно длиннее (рисунок г, д). Также возможно использование двух перегородок смотри рисунок (є).
![]()
![]()
![]()
![]()
![]()
![]()
Первые эксперименты я проводил, используя сервомашинки. Но они не совсем подходят к этой задаче. Во-первых, сервомашинки довольно много потребляют электроэнергии, даже когда не двигаются. Во вторых, они имеют свою внутреннюю обратную связь по положению, что только мешает. В-третьих, управлять сервоприводами надо исключительно микроконтроллером. Хотя схема и была технически несовершенной, игрушка получилась забавная. За фонариком «головой» крутила очень забавно.
Логично чтобы система ориентирования на солнце работала от солнечной энергии, поэтому уровень потребления электроэнергии должно быть как можно более экономичным. Хочу заметить, что Солнце по небосводу движется неторопливо, поэтому хватит маломощного двигателя с редуктором, у которого передаточное число 200 и больше. Итак, дела пошли лучше, когда у меня появился такой редуктор. К редуктору присоединил миниатюрного двигатель. Для управления направлением вращения двигателя была изготовлена мостовая система. Опросы фоторезисторов и управления двигателем выполняет микроконтроллер. Хватило бы и простого компаратора, но в перспективе микроконтроллер должен выполнять еще некоторые сопутствующие функции.
Итак, конечная схема для ориентирования по дной оси такая:
![]()
Преимущество схемы в том, что она не требует соблюдения точных номиналов резисторов и настройки. Недостаток — наличие микроконтроллера, который надо программировать. Но этот недостаток нивелируется когда микроконтроллер выполняет дополнительные функции.
Программа для микроконтроллера выглядит так:
Источник
Трекеры для солнечных панелей: зачем нужны и в чем их преимущества

Солнечные трекеры представляют собой специализированные конструкции, задачей которых является периодическое изменение ориентации фотоэлектрических панелей или зеркал относительно солнца. Угол наклона рабочих поверхностей регулируется вручную или автоматически, что позволяет добиться максимально возможной производительности солнечных систем любого типа.
Общие сведения
В роли улавливателя излучения, закрепленном на трекере, могут выступать:
- гелио модуль, объединяющий батарею полупроводниковых ячеек;
- параболическое зеркало, фокусирующее лучи на приемнике в виде нагревательного бака либо двигателе Стирлинга;
- специальные оптические устройства – чаще всего линзы;
- другие PV, CPV, HCPV и CSP системы.
Задача трекера для солнечных батарей – обеспечить максимально приближенный к перпендикуляру 90° угол падения лучей в любой момент времени.
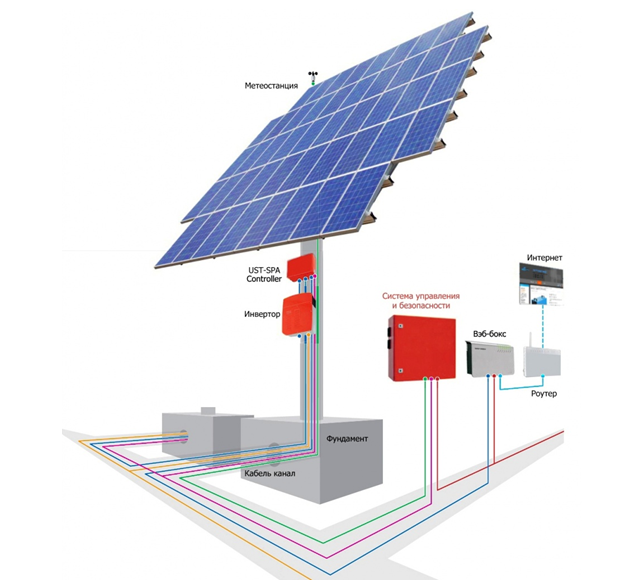
В комплект стандартного трекера для солнечных панелей входят следующие элементы:
- Несущая конструкция. Состоит из неподвижной опоры и поворотного устройства, позволяющего осуществлять вращение в одной или двух плоскостях.
- Система механического позиционирования. Управляет подвижной частью с помощью механизмов, называемых актуаторами.
- Комплексная системы безопасности. Обеспечивает различные типы защиты – от грозовых разрядов, скачков напряжения в сети, механических перегрузок. В наиболее дорогостоящих моделях имеется собственная мини метеостанция. При угрозе бурь, ураганов и прочих опасных погодных явлений система временно изменяет угол наклона рабочих поверхностей на максимально безопасное положение.
- Системы управления. Предназначены для удобного управления трекерами, включая удаленный доступ и их техническое обслуживание.
- Навигационная система. Входит в комплект только перемещаемых устройств с мобильной базой. Позволяет вводить в управляющий контур данные о географическом расположении – долготу, широту, высоту над уровнем моря.
Примечание: уровень сложности комплектации трекеров зависит от поставленных перед системой задач и экономической целесообразности.
Солнечный трекер для одной солнечной панели – требования к конструкции
Для всех типов трекеров существует обязательное требование – высокая прочность и устойчивость. Главная опасность для конструкций подобного рода – сильные ветры, которые могут опрокинуть батареи вместе с опорными мачтами.
Характерными чертами крупных модулей является значительный вес и большая рабочая площадь, а, значит, и парусность. Именно поэтому наиболее продвинутые системы с метеостанциями на борту разворачивают во время бурь солнечные батареи таким образом, чтобы модули располагались к направлению ветра торцом.
Виды трекеров для солнечных батарей
Большой ассортимент существующих моделей обусловлен различными требованиями к функциональности системы в тех или иных условиях. Таковыми являются географические широта и долгота, а также климатические особенности места установки. Влияет на выбор и экономическая эффективность использования трекеров. Для небольших маломощных станций покупка дорогостоящих поворотных установок нецелесообразна.
Солнечные трекеры с одной осью вращения (одноосные)
Вращение рабочих поверхностей в таких системах производится только вокруг одной оси. Управление осуществляется специальным программным обеспечением по алгоритму SPA (Solar Position Algorithm).
В зависимости от выбора приоритетного координатного направления, различают трекеры с вращением вокруг таких осей:
- вертикальной – VSAT;
- горизонтальной – HSAT;
- наклонной – TSAT;
- с ориентацией на сторону света (полярной) – PASAT.
1. Vertical single axis tracker (VSAT) – вертикальные.
Эта группа трекеров используется преимущественно в высоких широтах и заставляет вращаться солнечные батареи с востока на запад. Данное направление поворота требует соблюдать такое расстояние между элементами на опорах, чтобы не допустить при поворотах частичного затенения соседних панелей.
2. Horizontal single axis tracker (HSAT) – горизонтальные.
Горизонтальные солнечные трекеры характерны для низких широт. Вращение ориентировано по линии Север-Юг, что требует строго параллельного относительно друг друга размещения трубок крепления на каждой панели.
3. Tilted single axis tracke(TSAT) – наклонные.
Эта разновидность поворачивает рабочие поверхности по диагонали относительно вертикальной и горизонтальной осей. Особенности движения также требуют недопущения падения тени одних модулей на другие.
4. Polar aligned single axis trackers (PASAT) – полярные.
Ориентиром для трекерной системы является полярная звезда. Для одноосных конструкций эта считается классической и наиболее распространенной. Угол наклона батарей всегда оказывается равным географической широте.
Солнечные трекеры с двумя осями вращения — Dual axis trackers (DAT)
Два уровня регуляции позволяют таким системам постоянно поддерживать оптимальное расположение солнечных панелей относительно солнца. Это максимизирует их производительность, и на крупных солнечных фермах оправдывает финансовые затраты на покупку.
1. Модификация Tip-tilt dual axis tracker (TTDAT).
Основой поворотной системы служит длинная опора с шаровым подшипником. Вертикальная ось — вторичная для такой конструкции, основное движение идет в горизонтальной плоскости. Для двухосных конструкций расстояние между элементами должно быть еще большим, чем для одноосных вариантов.
2. Модификация Azimuth-altitude dual axis tracker (AADAT).
В отличие от предыдущего типа конструкций, AADAT используют не один крупный подшипник на опоре, а кольцо с платформой.
Преимуществом такого решения является большая устойчивость и возможность размещения на одной платформе модуля с достаточно большим количеством панелей. Недостаток конструкции – в необходимости учитывать размеры кольца, что требует большей площади участка.
Механизмы ориентирования солнечных батарей
Подвижные элементы трекеров могут управляться вручную либо автоматически. Второй вариант предполагает наличие в системе работающих от электродвигателя одного или двух актуаторов.
Поддержку нужного направления на солнце (может выдаваться программно в виде Рис.1 алгоритма солнечной позиции – SPA) эти устройства осуществляют следующим образом.
Способ №1. Использование датчиков с чувствительными фотоэлементами.
При оптимальной ориентации поток излучения на датчики одинаков. По мере перемещения солнца определенные фотоэлементы начинают получать меньше света, на что тут же реагирует система управления и посылает сигнал на актуаторы для совершения коррекции.
Достоинство такой системы – в полной автоматизации и расчете азимутного и зенитного углов в режиме реального времени. Недостаток – в полной потере работоспособности при отсутствии достаточного освещения, во время сильного дождя, снега или загрязнения поверхности датчика.
Способ №2. Ручное управление актуаторами.
Как и прямая корректировка угла наклона панелей своими руками, управление актуаторами с помощью тумблеров позволяет изменять ориентацию вручную, но гораздо быстрее. Обычно ручная коррекция производится нечасто, 2-4 раза в год, чего вполне достаточно для относительно малобюджетных СЭС.
Возможно и полуавтоматическое управление трекерами, для чего используется запрограммированный таймер на логическом контроллере, а не сложное ПО на защищенном компьютере.
Правила выбора трекеров для солнечных панелей
Трекерную систему определенного вида выбирают исходя из таких факторов, как климатические условия данной местности, размеры модулей, площадь участка и т.д.
Оптимальным выбором является:
- HSAT с горизонтальной осью – для систем в низких широтах. Они сравнительно недорогие, проще в эксплуатации и обеспечивают максимальную производительность во второй половине суток, когда потребление наибольшее.
- VSAT с вертикальной осью – в высоких широтах, где более важным является следование за низко стоящим солнцем с востока на запад.
- двухосные TTDAT и AADAT – в масштабных высокопроизводительных СЭС, где даже незначительное повышение КПД одной панели за счет оптимального направления на солнце дает серьезный рост общей генерации системы.
Источник
Датчик слежения за солнцем двухосной системы ориентации солнечных батарей
В статье предложена конструкция датчика слежения за солнцем для двухосных систем ориентации солнечных батарей. Датчик содержит лучевоспринимающие ячейки, выполненные в виде обратных конусов с непрозрачными стенками, укреплённых на площадке под углом равным широте местности. Ячейки защищены прозрачной полусферой. Устройство может быть применено при оборудовании солнечных электростанций.
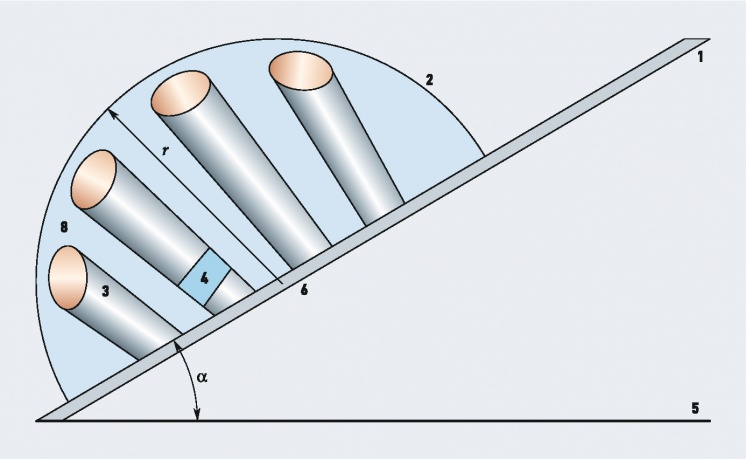
Рис. 1. Элементы конструкции датчика слежения за солнцем для двухосных систем ориентации солнечных батарей
Одним из очевидных способов повышения эффективности солнечных энергоустановок является использование в них систем слежения за солнцем. Разработка следящих систем с простым обслуживанием позволит в значительной степени повысить технико-экономические показатели сельскохозяйственных объектов и создать комфортные условия труда и быта человека при одновременном обеспечении экологической безопасности окружающей среды. Системы слежения могут быть с одной или двумя осями вращения солнечных панелей.
Солнечная энергоустановка [1] с системой слежения, включающей компактный фотоэлектрический датчик положения солнца, состоящий из каркаса в форме прямой трёхгранной призмы, на двух боковых гранях которой размещены фотоэлементы слежения за солнцем, а на третьей грани установлен командный фотоэлемент разворота модулей с запада на восток. В течение светового дня фотоэлементы слежения на гранях датчика выдают командные сигналы для блока управления приводом азимутального поворота солнечного модуля, который при этом разворачивается в направлении солнца с помощью вала. Недостатком установки является недостаточная точность слежения за солнцем.
Солнечная энергетическая установка [2] содержит солнечную батарею с системой двухосной ориентацией на солнце, на которой в качестве датчиков слежения за солнцем установлены фотоэлектрические модули, содержащие линейные фотоприёмники, находящиеся в фокусах цилиндрических линз Френеля. Сигналы от фотоприёмников с помощью микропроцессора осуществляют управление приводами системы азимутальной и зенитальной ориентации солнечной батареи.
Недостатком этой установки является недостаточная точность слежения за солнцем, а также то, что датчики слежения занимают часть активной площади солнечной батареи.
Основной задачей разработки является повышение точности работы датчика слежения за солнцем для двухосных систем ориентации солнечных батарей при любом положении солнца на небосводе в течение года.
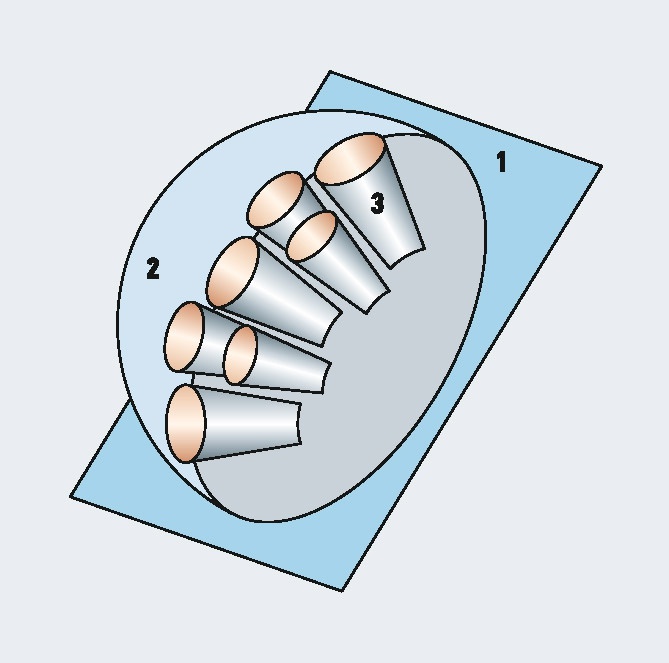
Вышеуказанный технический результат достигается тем, что в предлагаемом датчике слежения за солнцем двухосной системы ориентации солнечной батареи, содержащем блок лучевоспринимающих ячеек, установленных на неподвижной площадке, которые выполнены в виде обратных конусов с непрозрачными стенками и укреплены на узких торцах конусов фотоэлектрических элементов. При этом лучевоспринимающие ячейки плотно установлены на площадке с образованием телесного угла в 160° и обрамлены прозрачной сферой, укреплённой на площадке, которая установлена с наклоном к горизонтали под углом, равным географической широте местоположения датчика.
Датчик слежения устанавливается на неподвижной площадке, нормаль 6 которой (рис. 1) направляется на юг. Угол наклона площадки к горизонтальному основанию соответствует географической широте местности рядом с солнечной батареей, размещённой на механической системе ориентации на солнце, содержащей приводы зенитального и азимутального вращения, использующие шаговые мотор-редукторы. Управление приводами солнечной батареи осуществляется микропроцессором, получающим электрические импульсы от фотоэлектрических элементов ячеек датчика. Микропроцессор содержит информацию о географической широте местонахождения солнечной батареи, электронные часы, снабжённые календарём, по сигналам которых включаются мотор-редукторы зенитального и азимутального вращения солнечной батареи в соответствии с уравнением движения солнца на небосводе. При этом величины достигнутых углов поворота солнечной батареи по сигналам фотоэлектрических элементов ячеек датчика сравниваются со значениями, полученными их уравнения движения солнца на текущий момент времени.
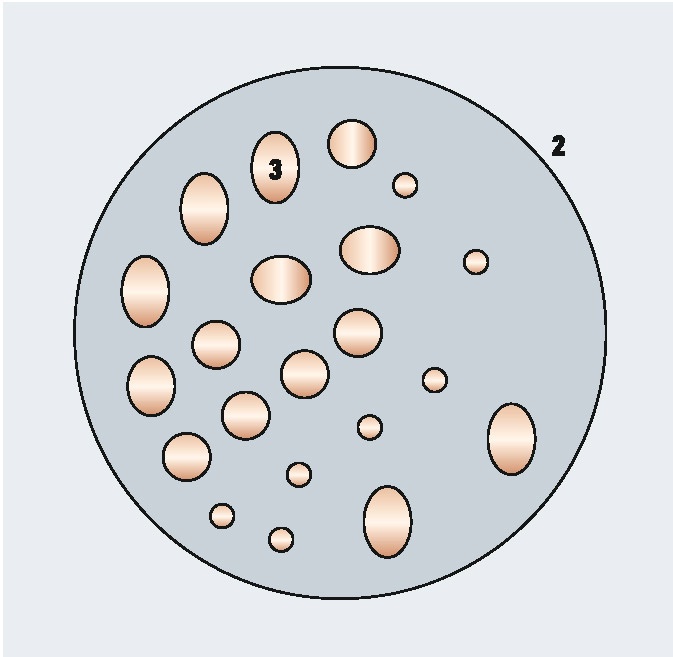
Сущность конструкции датчика поясняется рис. 1, 2, 3 и 4. На рис. 1 и 3 представлена общая схема датчика. На рис. 2 показан вид сверху прозрачной сферы и лучевоспринимающих ячеек. На рис. 4 показана схема такой ячейки.
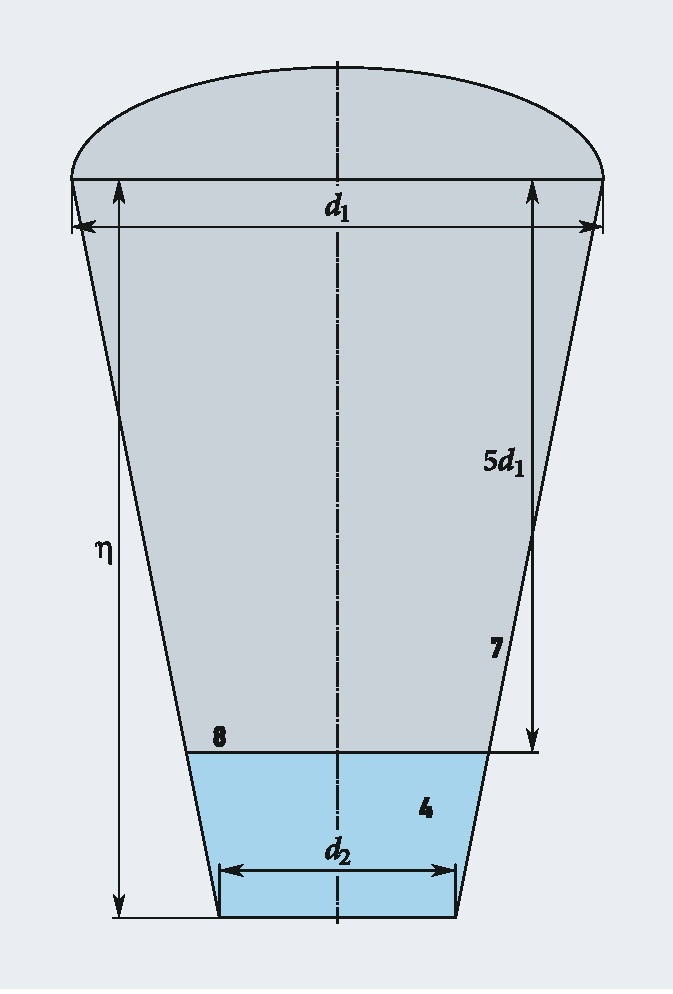
Датчик слежения за солнцем для двухосной системы ориентации солнечных батарей содержит площадку 1, укреплённую к горизонтальному основанию 5 под углом а, равным географической широте местности. К площадке 1 прикреплена прозрачная полусфера 2 радиусом г. Во всём внутреннем пространстве сферы 2 вплотную укреплены лучевоспринимающие ячейки 3, имеющие форму обратного конуса с непрозрачными стенками 7, обращённого диаметром ф к внутренней стенке прозрачной сферы 2, а диаметром d2 к площадке 1. Высота конуса 3 равна расстоянию h от внутренней стенки сферы 2 до поверхности площадки 1. В нижней части конуса 3 на расстоянии 5d1 от верхней кромки конуса 3 расположен фотоэлектрический элемент 4, электрический сигнал от которого передаётся в микропроцессорную систему управления поворотами осей солнечной батареи (на рис. 1 не показана). Расстояние 5d1 выбирается таким образом, чтобы солнечный луч 8 точно фиксировался на фотоэлектрическом элементе 4, ограниченного непрозрачными стенками 7 конуса 3.
Датчик слежения за солнцем работает следующим образом. Солнечные лучи 8 проникают через прозрачную сферу 2, внутреннее пространство конуса 3 и попадают на фотоэлектрический элемент 4, вызывая электрический ток, который анализируется микропроцессором и передаётся на шаговые мотор-редукторы приводов системы ориентации солнечной батареи (на рисунке не показана). При перемещении солнца по небосводу, его лучи 8 постепенно включают фотоэлектрические элементы 3 и способствуют точному и плавному регулированию поворотов солнечной батареи по азимутальной и зенитальной осям.
Лабораторные испытания макета ячейки датчика с использованием имитатора солнечного излучения показали приемлемые результаты отсекания светового потока для принятых значений d1, d2 и 5dx.
Датчик слежения за солнцем двухосной системы ориентации солнечной батареи содержит лучевоспринимающие ячейки, выполненные в виде обратных конусов, плотно установленных на площадке с образованием телесного угла в 160° и обрамленных прозрачной сферой, позволяет более точно ориентировать солнечные батареи и тем самым получать наибольшее количество электроэнергии от них.
Источник