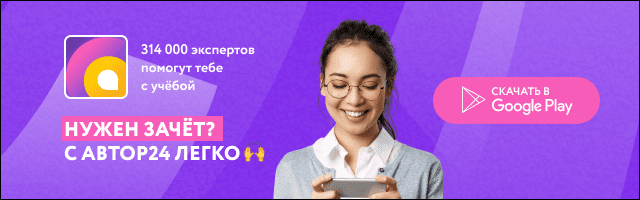
Рис. 33. Соотношение между истинным курсом самолета, азимутом и курсовым углом светила
значительно снижают точность показаний магнитных компасов, а иногда и совершенно исключают возможность использования их в полете.
Астрономические компасы в отличие от других компасов позволяют непосредственно определять истинный курс самолета.
Принцип определения курса с помощью астрономического компаса основан на определении направления на
какое-либо небесное светило:

Солнце, Луну, планету или звезду. Измерить направление на светило и определить его курсовой угол, т. е. угол между продольной осью самолета и направлением на светило, можно любым визиром. Курсовой угол Солнца можно измерить, используя тень от какого-нибудь вертикального стержня. Бели, например, на самолете поместить круг, разделенный на 360°, и в центре круга поставить вертикальный стержень, то тень от стержня покажет величину курсового угла Солнца, измененного на 180°.
В основу измерения истин-
ного курса самолета по астроно-
Рис. 33. Соотношение между истинным курсом самолета, азимутом и курсовым углом светила
мическому компасу -положено равенство истинного курса (ИК) разности между азимутом (А)
светила и его курсовым углом (КУ). Как видно из рис. 33, ИК = А — КУ.
Современные астрономические компасы имеют различные устройства для визирования светил. Среди них простейшие устройства, состоящие из прорези и мушки, и различные оптические визирные системы. Существует визирная система, позволяющая определять направление на Солнце, когда оно не видно. Это поляризационная визирная система, основанная на использовании эффекта поляризации рассеянного солнечного света, проходящего через поляризатор. Она позволяет определить направление на Солнце, когда оно за облаками или ниже горизонта до 7° и когда некоторые участки неба открыты от облаков. Особенно необходимо применение этой системы в полярных районах, где сумерки про-
Источник
Курсовой угол солнца это
В практике иногда необходимо знать точное направление истинного меридиана на местности, например при ориентировании антенн радиотехнических систем, при начальной выставке точных курсовых систем, при определении магнитного склонения и т. д.
Основным способом определения направления истинного меридиана на местности является астрономический. Сущность этого способа состоит в следующем.
С помощью теодолита измеряют азимут Солнца и отмечают по часам точный момент его измерения. Измерение азимута производится относительно линии 0—180° горизонтальной шкалы теодолита. Нуль этой шкалы приближенно устанавливается в направлении на север. Поэтому измеренный азимут, как правило, не соответствует истинному азимуту Солнца.
Для времени измерения с помощью ААЕ определяют местный часовой угол и склонение Солнца. Затем рассчитывают фактический азимут и сравнивают его с измеренным. Выявив таким образом ошибку установки нуля теодолита, находят направление истинного меридиана в данной точке. Расчет азимута Солнца в этом случае производят математическим путем, так как таблицы не обеспечивают вычисление его с точностью более 

Для получения азимута с высокой точностью, вычисления необходимо производить с применением четырехзначных таблиц тригонометрических функций.
Пример. Дата 20-го августа 1975 г.; координаты места наблюдателя: широта  долгота
долгота  время измерения азимута Солнца с учетом поправки часов
время измерения азимута Солнца с учетом поправки часов  мин 20 с; номер часового пояса, по времени которого идут часы,
мин 20 с; номер часового пояса, по времени которого идут часы,  Рассчитать азимут Солнца.
Рассчитать азимут Солнца.
Решение. 1. Определяем гринвичское время измерения:

2. Находим с помощью ААЕ (см. приложение 5) гринвичский часовой угол и склонение Солнца:
Источник
Как определить направление полета по Солнцу, Луне,
Направление полета (истинный курс) определяется как разность между Азимутом светила (АзС) его курсовым углом (КУС).
Азимут светила — это угол, заключенный между северным направлением истинного меридиана проходящего через самолет и направлением на светило.
Курсовой угол светила (КУС) — это угол в горизонтальной плоскости между продольной осью самолета и направлением на светило.
Кус принимает значения 180 . Вправо от продольной оси знак «+», влево знак «-«.
ИК = Азс — КУС Пример:
Азс = 60 град. КУС = -50 град. ИК = ?
ИК = 60 град.- (-50 град.) = 110 град.
Азс = 215 град. КУС = 70 град. ИК = ?
ИК = 215 — 70 = 145
Если самолет выполняет полет строго на светило, то ИК=Азс. Курс определяется визуально.
Азимут светила определяется следующим образом:
Азимут Солнца рассчитывается перед полетом на определенное время, далее азимут увеличивается на 15 за каждый час, или рассчитывается в полете на данное время по следующей формуле:
АзС = 15 x (Тпоясн — t )
где : 15 — угловая скорость вращения Земли
Тпоясн — поясное время.
t = 2 часа летом (1час зимой)
Для более точного определения азимута Солнца,Луны необходимо использовать местное время.
Тместн = Тпоясн — NП — t +
где : Nп — номер часового пояса временем которого
пользуемся — долгота места нахождения самолета во временной мере.
Для района полетов можно рассчитать таблицу.
Азимут Луны определяется по следующей формуле:
Аз = 15 х (Тпоясн — t + 180 + n x 12)
где : n — количество дней до или после полнолуния.
Знак «+» берется если полнолуние еще не наступило.Знак «-» после полнолуния.
Азимут Полярной звезды всегда равен 360 град.(0 град.).
10. Что должен делать летчик для предотвращения потери ориентировки?
Ориентировка считается потерянной, если экипаж не знает своего местонахождения и не может определить его с точностью, необходимой для продолжения полета в целях выполнения поставленной задачи.
Для того, чтобы не потерять ориентировку, экипаж должен:
постоянно вести счисления пути по курсу, времени и данным ПНК;
контролировать время полета на этапе маршрута;
контролировать свое место с использованием ПНК и по дублирующим средствам (АРК, запросам пеленга, своего места у Пункта управления), вести визуальную ориентировку (сличать карту с местностью);
контролировать работу ПНК по дублирующим средствам навигации (АРК, РСБН, запросам пеленга у АРП) , наличие коррекции ПНК от наземных маяков;
тщательно, аккуратно и продуманно готовиться к полету, готовить карту и штурманский план полета;
перед полетом контролировать правильность ввода программы и работоспособность ПНК;
уметь правильно и быстро определять направление полета по Солнцу, Луне, звездам.
11. Какие действия необходимо выполнять для восстановления ориентировки?
При потере ориентировки необходимо:
не допускать паники, необдуманных и поспешных действий, полета с произвольными курсами;
доложить о потере ориентировки на ПУ (свой или с которым установлена радиосвязь);
включить сигнал «бедствие»;
набрать высоту 6-8 км и стать в 3-х минутную правую коробочку ориентированную север-юг по небесным светилам и
убедиться в правильности курса;
перейти на режим максимальной продолжительности полета;
проверить работоспособность ПНК и свои координаты по дублирующим средствам навигации ;
передать по радио сигнал «Полюс»;
при потере ориентировки вблизи государственной границы взять курс в сторону своей территории;
запросить «Прибой» на 4 канале;
приступить к восстановлению ориентировки согласно штурманскому плану полета и инструкции по производству полетов в районе аэродрома;
вести круговую осмотрительность для обнаружения саиолета-лидера;
если ориентировку восстановили , доложить на ПУ и следовать на свой или ближайший аэродром в зависимости от остатка топлива.
12. Выход на аэродром по орбите по данным азимута и дальности для захода на посадку?
Данный метод захода на посадку используется при отказе навигационного оборудования (ИК-ВК), АРК и при полном отказе радиосвязи.
Для выхода на аэродром и захода на посадку необходимо:
1. Набрать на индикаторе N ЧК номера ЧКК посадочного и навигационного радиомаяков и оставить галетник ПУ-187 в положении НАВИГ.
2. После отработки на ПНП дальности и азимута самолета относительно выставленного радиомаяка аэродрома посадки снять отсчет с обратного конца стрелки КУР по внутренней шкале — обратный конец показывает азимут от РСБН.
3. Взять курс на аэродром посадки с помощью КИ-13 и в течение 2-3 мин выдержать прямолинейный полет, во время которого определить как изменяется азимут. По этому изменению определить сторону уклонения от направления на радиомаяк и выполнить доворот на радиомаяк. В дальнейшем управляя самолетом, удерживать обратный конец стрелки КУР по внутренней шкале на одном и том же отсчете, контролируя свое место по азимуту. (Шкала текущего курса ПНП вследствие отказа ИК-ВК может произвольно менять свой отсчет или стоять на месте).
4. При подлете к радиомаяку на расчетной дальности Др=Дтнр выполнить отворот в сторону ТНР на 90 град. и лететь на ТНР по орбите радиуса Дтнр, контролируя азимут по показаниям обратного конца стрелки КУР по внутренней шкале. При отработке азимута равного Азтнр. начать выполнять разворот на посадочный курс. В конце разворота ИКпос=А град. +180 град.
После разворота на посадочный курс поставить галетник ПУ-187 в положение ПОСАДКА и после включения режима «ПОСАДКА» осуществлять выход на посадочный курс с помощью курсовой планки положения ПНП и стрелке КУР.
6. Направление полета на посадочном курсе выдерживать, удерживая курсовую планку положения ПНП в пределах кружка, а траекторию снижения, руководствуясь показаниями счетчика дальности ПНП и высотомера. При снижении на посадочном курсе глиссадная планка положения ПНП плавно подходит снизу к кружку. После её прихода удерживать обе планки в центре кружка. При обнаружении ВПП расчет и посадка выполняються визуально.
13. Заход на посадку по дублирующим средствам навигации КУРС + АРК
Заход на посадку с помощью курса и АРК, при отказавших РСБН («Маневр») и радиосвязи выполняется следующим образом:
выход на аэродром осуществлять полетом на радиостанцию, выдерживая постоянно КУР=О (по тупому концу стрелки КУР на внутренней шкале ПНП определить ИПС, который грубо равен азимуту самолета для определения направления выхода на
аэродром посадки). В процессе выполнения полета вручную
кремальерой ЗПУ выставить стрелку ЗПУ на посадочный курс
( предварительно нажав на пульте АРК и ИК-ВК кнопку «ЗК РУЧН»).
Перед выходом на ДПРМ в зависимости от угла подхода к посадочному курсу определить способ захода на посадку:
отворотом на расчетный угол при выходе на ДПРМ с курсом, отличающимся от обратно посадочного на угол до 30-45 град;
разворотом на 180 град. при выходе на ДПРМ с
курсом, близким к посадочному;
разворотом в сторону наименьшего угла при выходе на ДПРМ с курсом, отличным от посадочного на 90 или 270 град.
Используя один из вышеуказанных способов выйти в точку начала разворота на посадочный курс. Первую половину разворота осуществлять выдерживанием заданного крена, во второй половине разворота следить, стобы стрелка КУР шла впереди ЗПУ. В момент выхода на посадочный курс стрелки КУР и ЗПУ должны совместиться.
После выхода на ПК выдерживать КУР=О, сравнить показания фактического курса с курсом посадки. Если фактический курс больше посадочного, самолет находится слева от оси ВПП, меньше-справа. В зависимости от положения самолета относительно ВПП взять двойную поправку в курс и выдерживать ее до выхода на ПК.
14. Заход на посадку с использованием пеленгатора.
Установив связь с р/пеленгатором или РБЗ, запросить «Прибой» (магнитный курс следования на р/пеленгатор). Получив «Прибой», развернуть самолет на курс, равный значению «Прибоя» и продолжать полет с этим курсом. Периодически запрашивая «Прибой», уточнить курс для выхода на пеленгатор. В процессе выполнения полета вручную кремальерой ЗПУ выставить стрелку ЗПУ на посадочный курс (предварительно нажав на пульте АРК и ИК-ВК кнопку «ЗК РУЧН») Получив команду о проходе р/пеленгатора, взять курс, указанный РП (РБЗ) и выполнить маневр для захода на посадку из следующих способов:
-отворотом на расчетный угол;
-разворотом на 180 град.
-разворотом в сторону наименьшего угла.
По истечении расчетного времени начала разворота, выполнить разворот на посадочный курс.
Первую половину разворота осуществлять выдергиванием заданного крена.
Во второй половине разворота, периодически запрашивая «Прибой», изменением крена уточнять выход на посадочный курс. Когда разность между «Прибоем» и посадочным курсом будет равна 2 — 3 град., необходимо занять ПК.
На ПК получив информацию о «Прибое» (РЗП на ПК дает истинный «Прибой») сравнить его значение с посадочным курсом и взять двойную поправку в курс, применяя правило:
-«Прибой» больше слева от оси ВПП — доверни вправо;
-«Прибой» меньше — самолет справа от оси ВПП — доверни влево.
Выдерживая взятую поправку выйти на ПК, запрашивая «Прибой».
Источник
ОМС по измерениям высот Солнца.
Учитывая то, что в море зачастую нет возможности одновременно измерить высоты двух светил, возникает потребность в способе ОМС по одному светилу, главным образом Солнцу. Для получения двух линий прибегают к разновременным наблюдениям одного светила. В течение суток Солнце постоянно меняет своё положение относительно наблюдателя. То есть, если после получения первой линии положения подождать некоторое время, то можно получить вторую линию положения не совпадающую с первой. Если судно не перемещалось, то обсервованное место будет находиться на пересечении этих двух линий.
На практике более важен случай ОМС при движении судна, поэтому обе линии комбинировать нельзя, пока они не будут приведены к одному месту (зениту). На практике это приведение осуществляется графическим приёмом, основанным на принципе сопутствующей линии положения. То есть предполагается, что первая линия переместилась вместе с судном на величину плавания S. Очевидно, что полученное место будет содержать будет содержать ошибки счисления и по сути дела даст обсервованно-счислимое место (аналогично крюйс-пеленгу), однако это место называют обсервованным и обозначают двойным кружком.
В случае ОМС по разновременным линиям положения на точность обсервации влияют не только ошибки в линиях положения, но и ошибки счисления. В этом случае радиальная СКП рассчитывается следующим образом: 
рассчитываем погрешность первой линии положения, учитывая погрешности счисления между наблюдениями Солнца:
S – пройденное расстояние;
КУ – курсовой угол Солнца при первом измерении;
mk – СКП определения курса;

В случае mn1= mn2= mn формула примет вид:

Измеряется серия в 3-5 высот Солнца, причём на каждый отсчёт секстана ОСi засекается момент времени по хронометру ТХРi с точностью до 1с, после чего определяется вероятнейшее (среднее) значение ОССР и среднее время измерений ТСР. На момент измерения замечается судовое время Тс с точностью до 1м, счислимые координаты судна, ИК или ПУ, скорость, отсчёт лага, высота глаза наблюдателя е, температура воздуха и атмосферное давление.
Рассчитываем местный часовой угол Солнца tМ и его склонение d при помощи таблиц МАЕ на полученные гринвичскую дату и время (выдержки из МАЕ на 1993г. приведены в конце пособия).
При помощи таблиц для расчёта высот и азимутов светил (ТВА-57, ВАС-58, МТ-75 или им аналогичных) рассчитываем счислимую высоту hC и счислимый азимут АС Солнца.
Исправляем высоту Солнца. Получаем истинные hС.
Производим действия 1-4 через некоторое время для другого положения Солнца;
На путевой карте или обратной стороне бланка графическим способом определяем поправки координат Dj, Dl для времени вторых наблюдений, обсервованные координаты, невязки.
3. Гирокомпас «Амур — ЗМ»: устройство, эксплуатация.
t поддерж. жидкости 55°С, комбинир. подвес ЧЭ: жидкостный с 2-мя центрир. катушками и ртутным подшипником, принудит, воздуш. охлаждение. Точность при плавании пост, курсом — 1,5°, при неподвижности ±0,35°. Время отаботки след. системой угла 90° не более 15 с. Точность отработки след. системой при её рассоглас. на 0,5-0,8° равна 0,2°.
Штурман должен контролировать точность показаний ГК, не реже 1 раза за вахту определять DГК, проверять и при необходимости согласовывать показания всех принимающих приборов с показаниями основного ГК, менять в курсографе бумагу, согласовывать узел курса.
ПОДГОТОВКА К РАБОТЕ. Необходимо:
1) Убедиться, что все выключатели находятся в положении ВЫКЛЮЧЕНО, а ручки реостатов осветительных ламп — в крайнем левом положении, что также соответствует положению ВЫКЛЮЧЕНО;
2) проверить наличие, исправность и правильность посадки в гнезда предохранителей;
3) замерить уровень поддерживающей жидкости в резервуаре основного компаса (от верхнего края наливного отверстия до зеркала должно быть 35 мм);
6) заправить чернилами перья курсографа;
7) все репитеры согласовать с показаниями основного, компаса.
ПУСК. Последовательность операций следующая:
1. Подать в схему питание, т. е. в приборе 1А пакетный переключатель судовая сеть поставить в положение включено.
Контроль: работает агрегат, загорается зеленая сигнальная лампа питание 500Гц,
2. Проверить пусковые токи в гиромоторах согласно показаниям амперметров в приборе 1А Величина пусковых токов должна быть: I фаза 4,0 А; II фаза 4,5 A; III фаза 3,7 А.
3. Проверить рабочие токи в гиромоторах через некоторый промежуток времени в приборе 1А по амперметрам. Величина рабочих токов должна быть: I фаза 0,8-1,2 А; II фаза 1,0-1,4 A; III фаза 1,2-1,6 А.
4. Проверить температуру поддерживающей жидкости в приборе 1А по термометру.
5. Включить вентилятор. В приборе 1А переключатель вентилятор поставить в положение автоматическая работа.
Контроль: вращение крыльчатки.
6. Проверить положение ЧЭ по высоте. Погрешность совпадения экваториальных линий ЧЭ и следящей сферы должна не превышать ±1,5 мм.Проверка выполняется, когда ЧЭ придет в меридиан.
7. Проверить согласованность репитеров с показаниями основного компаса, а курсограф установись по времени.
8. Заполнить колонки 1 и 4 формы технического формуляра гирокомпаса (дата, цель включения, источник питания, время запуска, время остановки, продолжительность работы).
1. В положение выключено поставить переключатели:
а) следящей системы, охлаждения и освещения;
б) судовая сеть, т. е. остановить агрегат;
2. Сделать запись в техническом формуляре.
Подготовка судна к плаванию в шторм. Управление судном на волнении. Влияние волнения на ходовые качества судна.
Каждое судно перед выходом в море должно быть поведено в состояние, которое обеспечивает безопасность его плавания в любых условиях. При составлении каргоплана надо обеспечить местную и общую прочность корпуса, мореходные качества судна. При получении штормового предупреждения принимаются следующие меры:
· Предупредить экипаж, усилить наблюдение за гидрометеообстановкой;
· Осмотреть судно и привести его в походное состояние;
· Задраить водонепроницаемые закрытия;
· Проверить плотность закрытия мерительных трубок;
· Проверить и обжать крепления груза;
· Проверить надёжность крепления грузовых стрел и кранов;
· Задраить иллюминаторы на броняжки;
· В помещениях закрепить мебель и инвентарь;
· Натянуть штормовые леера;
· Установить режим движения людей на судне;
Основная опасность – волнение – вызывает качку, значительные напряжения корпуса и удары волн. Качка и удары волн значительно ухудшают управляемость и требуется частая перекладка руля. Увеличивается сопротивление, судно теряет скорость, снижается эффективность винта, появляется слеминг, рыскание, увеличивается сопротивление из-за перекладки руля и дрейфа, увеличивается длина пути судна, расход топлива.
Управление судном на волнении. Большое значение при плавании в штормовых условиях имеет правильное управление рулем. Необходимо заблаговременно перекладывать руль, чтобы не допустить уход судна с заданного курса, перейти на ручное управление, так как в штормовых условиях наиболее важно сохранить управляемость судна, а это чаще всего можно достигнуть только перекладкой руля на большие углы. Для любого судна, в зависимости от условий и степени шторма поворот на другой курс связан с целым рядом неприятных или даже опасных обстоятельств: усилением качки, зарыванием в волну, попаданием на палубу больших масс воды и др. поворот судна с встречных курсовых углов на попутные осуществляют перекладкой руля на подветренный борт в момент подхода группы больших волн с тем , чтобы в положении лагом к волне оно оказалось в период затишья, вторая часть поворота должна осуществляться быстрее, чтобы сократить время воздействия волн в опасном положении. Переход на кормовые курсовые углы может сопровождаться усилением бортовой качки вследствие сближения периода собственных колебаний судна и кажущегося периода волн, что следует оценить по диаграмме Ремеза. В некоторых случаях (например, для тихоходных судов) поворот под ветер выполняется на заднем ходу. Если на кормовых курсовых углах Тсобст>τ, то первая половина при повороте с попутного волнения на встречное должна выполняться на малом ходу, а вторая как можно быстрее. При Тсобст
Источник